Консультация / Тест-драйв


Создан для работы с МЛЭ, ADCP, ГБО, датчиком качества воды.





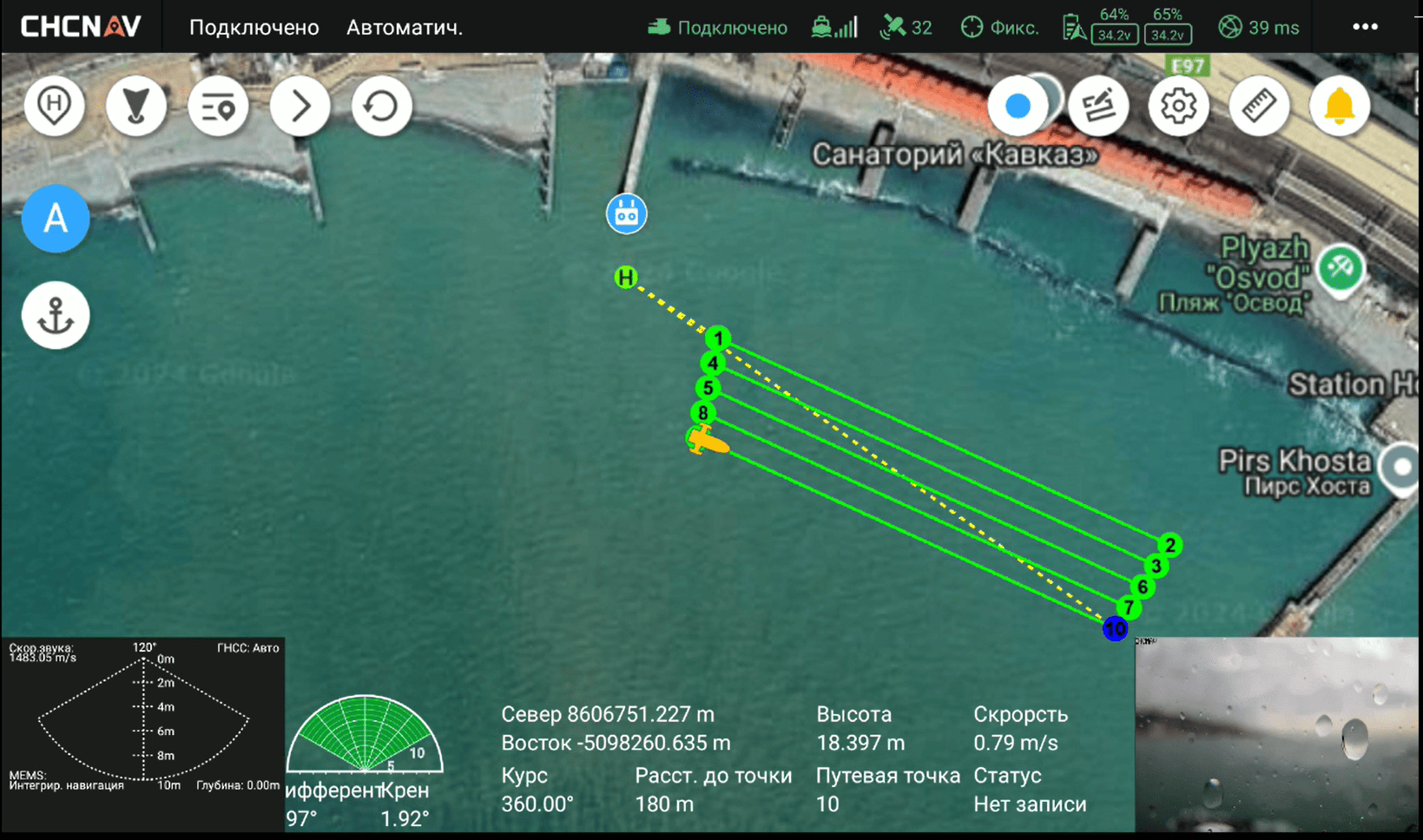
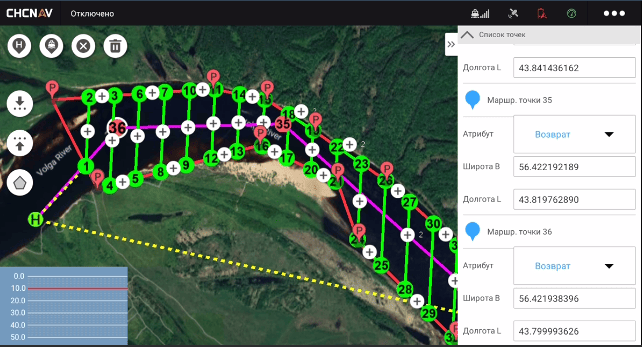
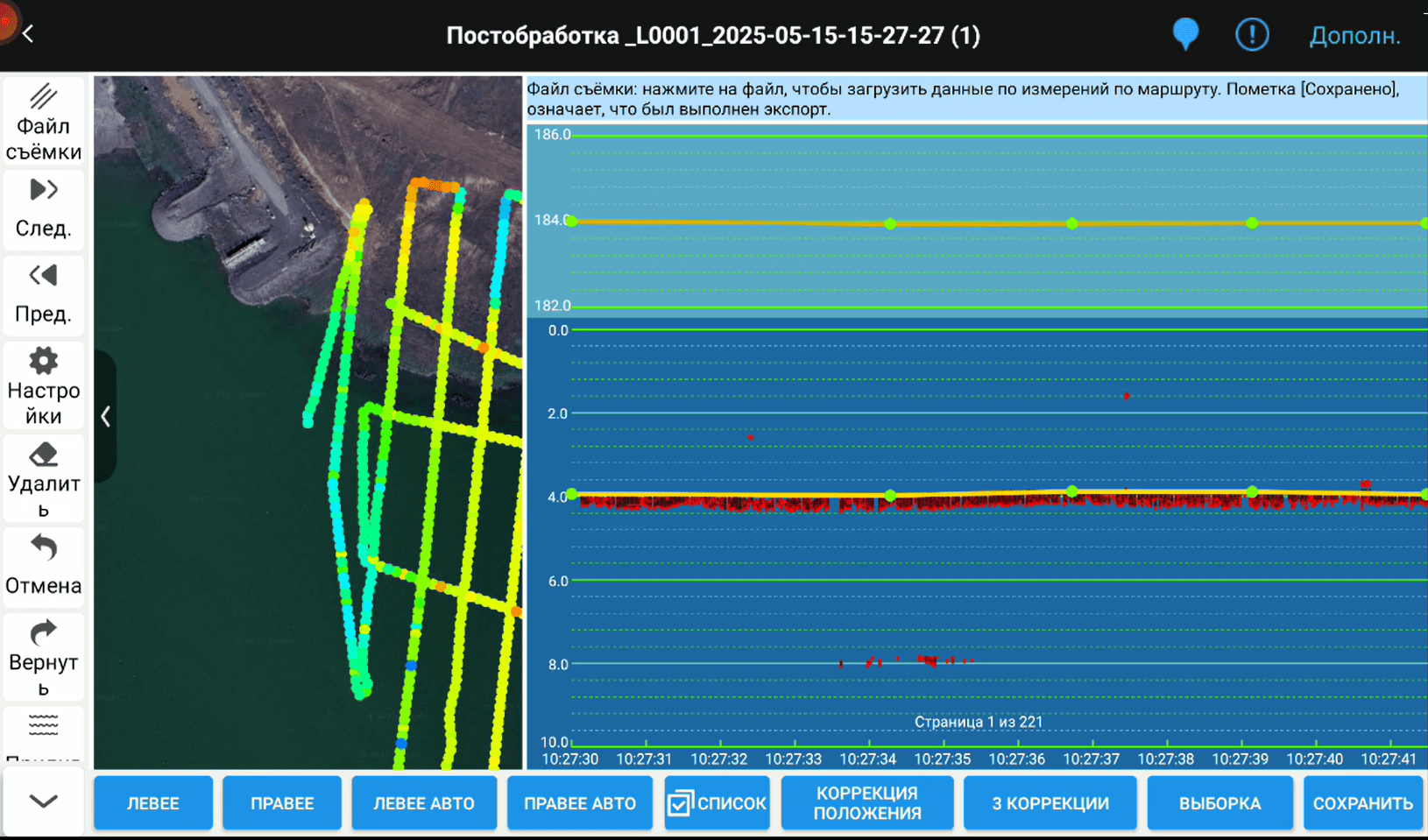
При помощи пульта дистанционного управления с предустановленным ПО EasySail выполняется планирование маршрута, контроль параметров и сбор данных в реальном времени, а также камеральная обработка результатов измерений с экспортом отчётных материалов



Определение расходов воды и глубины потока в гидрографических створах в областях, связанных с ведением водного хозяйства, водоснабжения предприятий, водоотведением и т.д.
Мониторинг скорости течения с использованием ADCP, получение вертикальных профилей скорости
Проведение русловых съемок
Мониторинг природных водных объектов и оценка качества воды для последующего очищения
Определение глубин водоемов, картографирование дна
Проведение инженерно – гидрографических изысканий при строительстве и эксплуатации любых гидротехнических сооружений
Поисковые работы, мониторинг подводных объектов с использованием ГБО
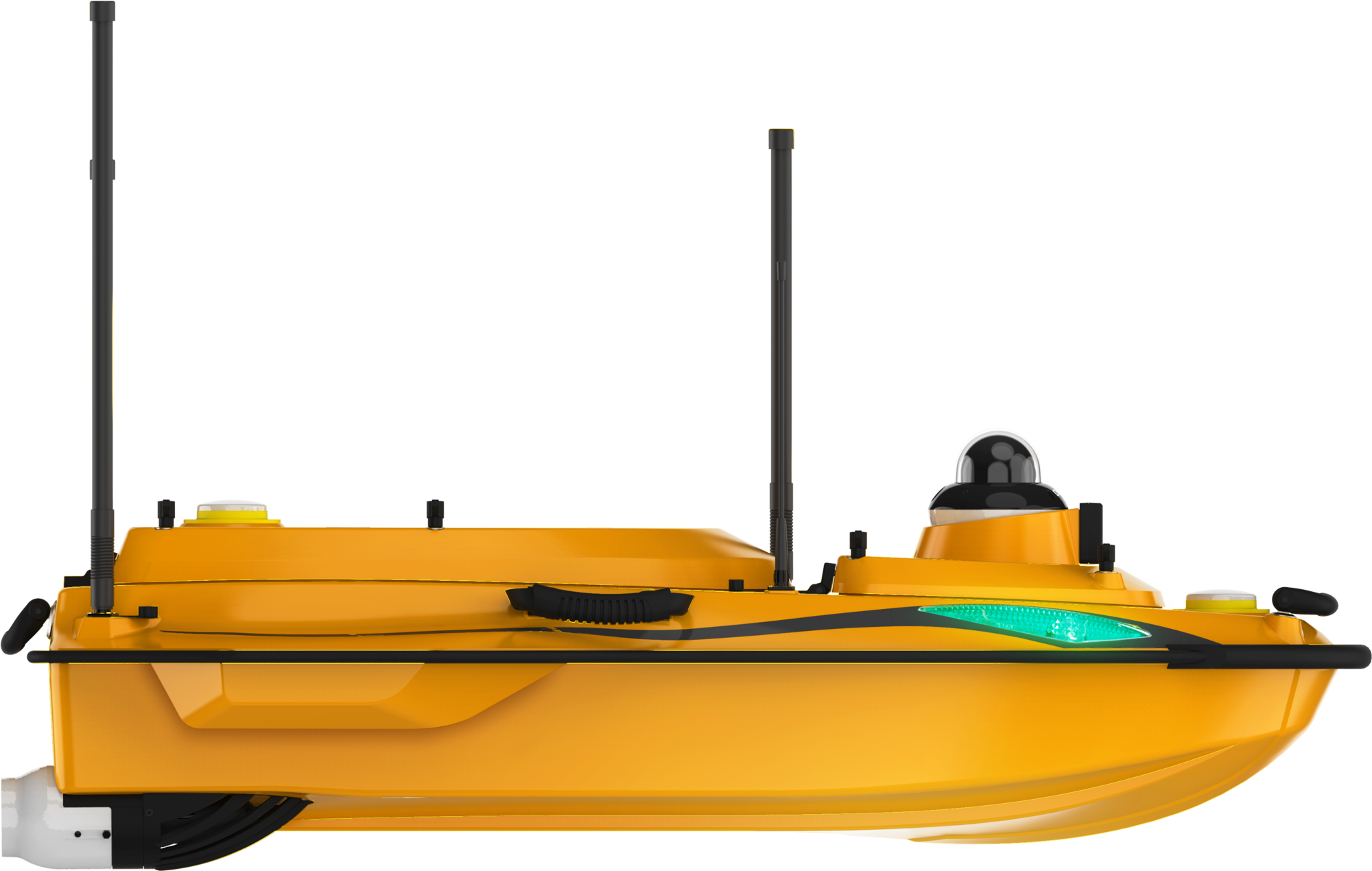
Габариты: 120 x 75 x 40 см
Удобная транспортировка в багажнике автомобиля
Точно следует курсу. Может двигаться ровно по прямой или зависать в одной точке, независимо от течения
Установите параметры и маршрут, и дрон сам выполнит задачу. Заряд батарей позволит работать около 3-х часов, а когда они будут разряжаться, дрон сам вернется в исходную точку
Идеален для измерения расхода воды и скорости течения на горных речках, или в районах с высоким уровнем опасности для людей
Можно поставить различные модели акустических доплеровских профилографов от ведущих мировых производителей, таких как CHCNAV, SonTek, Rowe, Teledyne RD Instruments
Интегрированное, компактное и доступное беспилотное решение. Не только переносит ADCP, но также обеспечивает его питание, координатную привязку промеров и передачу данных на наземную станцию
Получение акустического изображения дна в режиме реального времени для поисковых работ и мониторинга
Apache 4Pro с многолучевым эхолотом обеспечивает безопасность, эффективность и детальную съемку с высокой точность в самых разных сферах деятельности и условиях проведения работ.
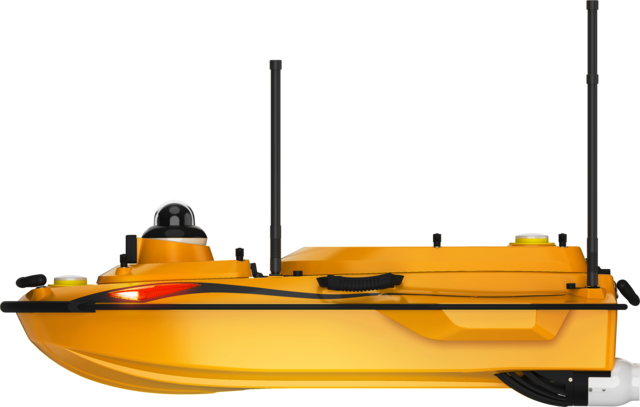
Длина: 120 см


Многолучевой эхолот
Позволяет делать промеры глубин с высоким разрешением, ЦМР дна, Растровое координатно-привязанное изображение дна
Однолучевой эхолот
Замеряет промеры глубин и профиль дна
Акустический доплеровский измеритель течения (ADCP)
Измеряет скорость течений и структуру водного потока, позволяет производить оценку расхода воды. Благодаря технологии с использованием совмещенного использования ADCP и однолучевого эхолота, минимизируется погрешность измерения расстояния до дна, связанная с неоднородностью взвесей и осадков в водной среде.
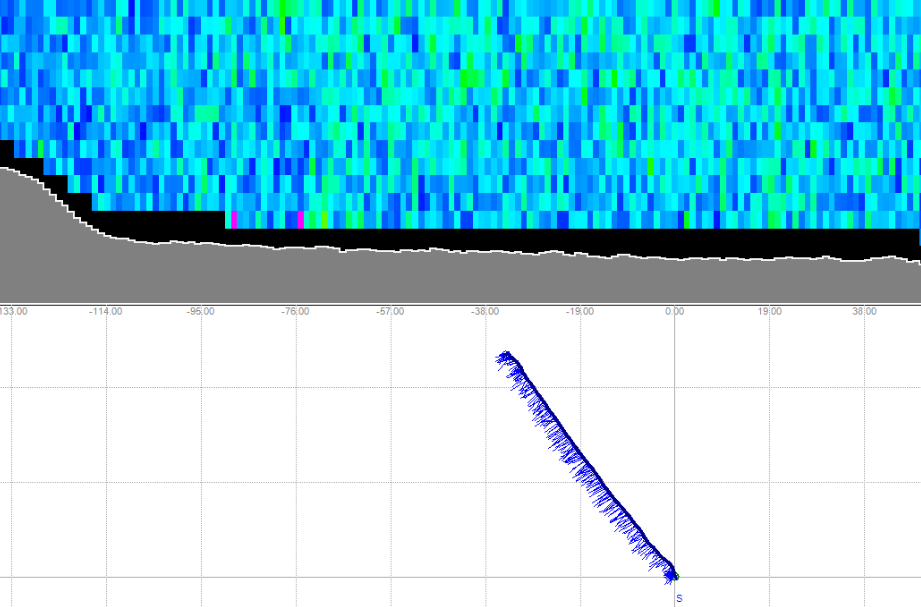
Гидролокатор бокового обзора (ГБО)
Акустические изображения, полученные с помощью ГБО используются для обнаружения на дне затонувших объектов, обломков и других препятствий, которые могут представлять опасность для судоходства или строительства, а также при выполнении дноуглубительных работ и изучения окружающей среды.
Анализатор качества воды (с возможностью подключения опциональных датчиков)
Замеряет показатели: pH, Растворенный кислород, Мутность, Электропроводность, Хлорофилл, Сине-зеленые водоросли, ОВП (ORP), Растворённые нефтепродукты, Соленость.
Задача состояла в съёмке дна в гавани и прилегающих областях для мониторинга состояния опор и воздействия вод на грунт в районе опор.
Площадь работ 7.2 км2. Средняя глубина – 2-3 метра, местами 0.5 м. Территория съёмки опасна для проведения обычной съёмки.
Для съёмки использовался Apache 6 с многолучевым эхолотом. В результате построена трёхмерная модель подводной части опор моста и рельефа дна.

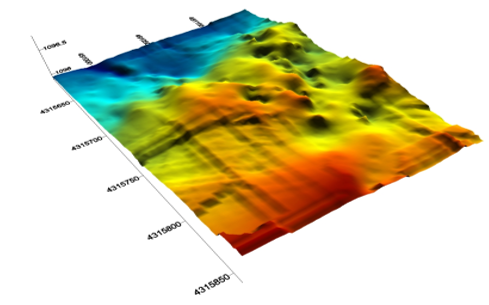
Дамба используется для решения задач ирригации, противопаводковой защиты, средний годовой сток 830 млн м3. Задача состояла в определении глубины водоспуска и построении модели рельефа дна.
Длина водоспуска – 5,2 км, ширина – 1,2 км. Требуются высокоточные результаты отображения контуров.
Использовался гидрографический бот Apache 6 с многолучевым эхолотом. В результате съёмки построена трёхмерная карта рельефа дна и подпорных стенок плотины.

Глубины от 20 до 110 метров. Протяжённый объект, требующий высокой степени детализации данных.
Для съёмки с бота APACHE использовался многолучевой эхолот. В процессе пост-обработки данные были объединены в одну трёхмерную модель рельефа дна и трубопровода.

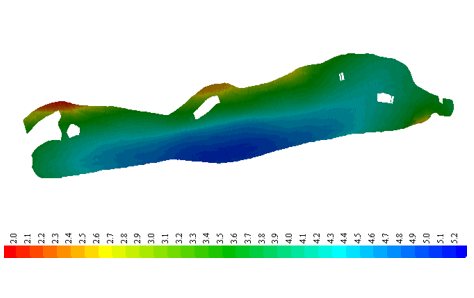
Задача состояла в измерении основных физико-химических параметров в канале для задачи экологического мониторинга.
Для съёмки использовался гидрографический бот Apache 3 с многопараметрическим зондом. В результате построены карты физико-химических параметров воды.
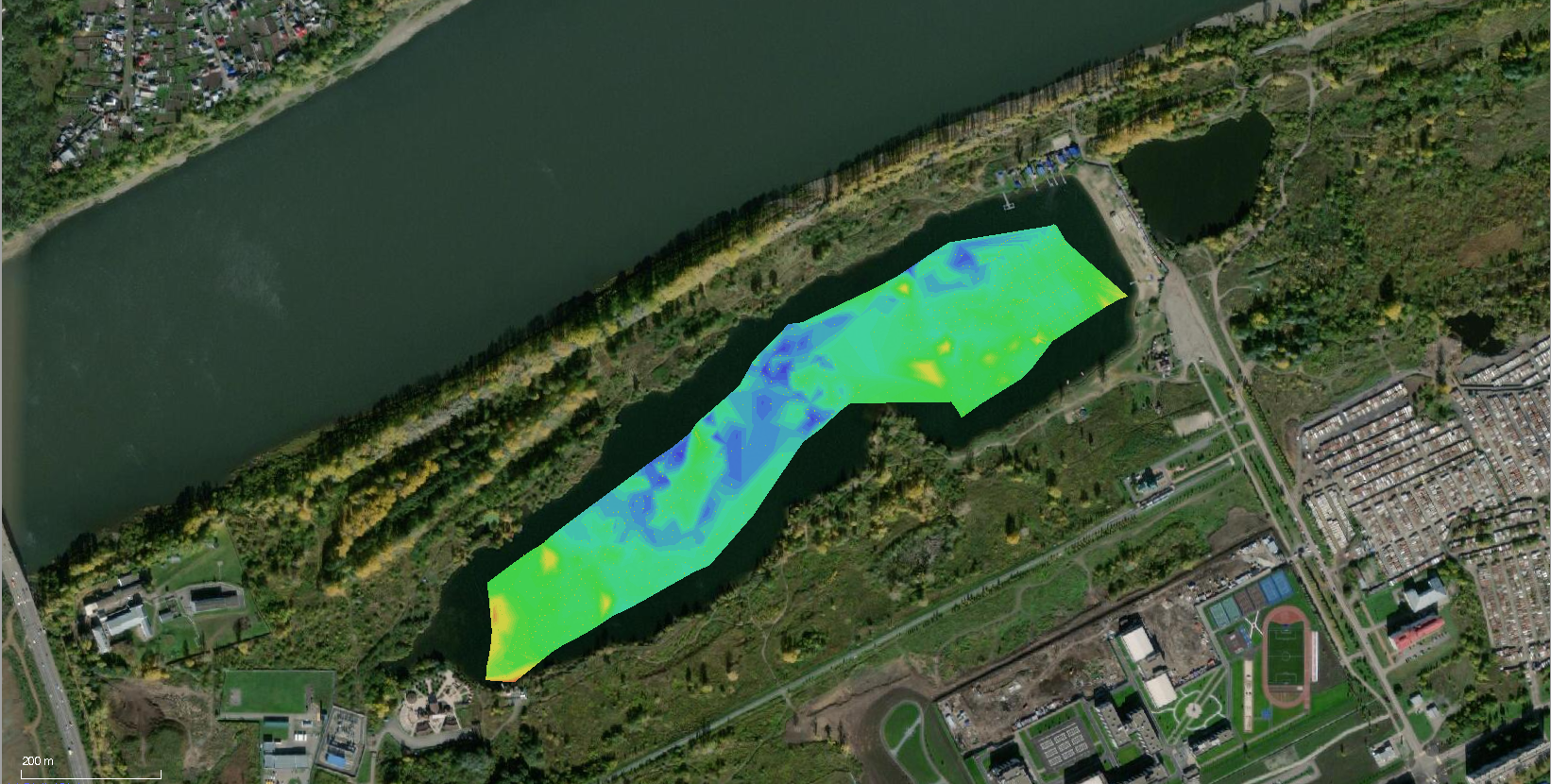
Задача состояла в построении батиметрической карты дна озера для предпроектных изысканий. Площадь озера 20 км2.
Для съёмки использовался Apache 3. В результате построена трёхмерная модель рельефа дна, а также поперечные профили полосы отвода.
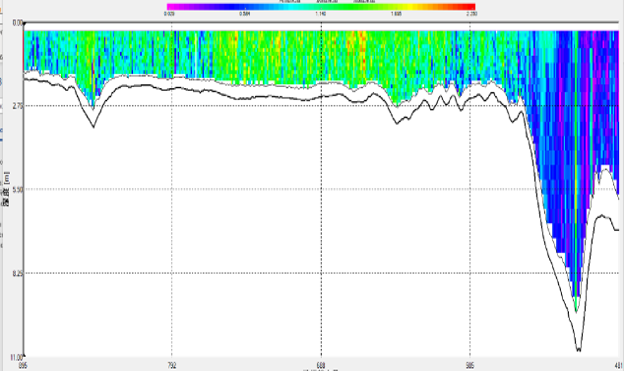
Необходимо было провести измерения скорости потока на различных глубинах для оценки вероятных мест затоплений.
Использовался бот Apache 4 с доплеровским профилографом ADCP. В результате построена карта и профили течений.
Измерение кислотности, температуры и параметров течения. Использовался датчик AP2000 и профилограф ADCP.
В результате построена трёхмерная карта течений для эффективного управления посадкой гидробионтов.

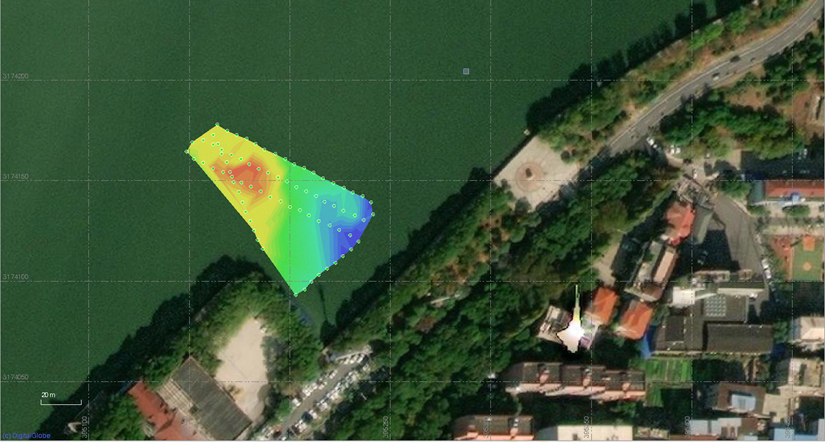
Задача состояла в съёмке рельефа дна канала ГЭС в условиях быстрого течения и большой площади мелководья.
Использовался Apache 3Pro. Построена трёхмерная модель рельефа дна канала, что помогло в эксплуатации станции.
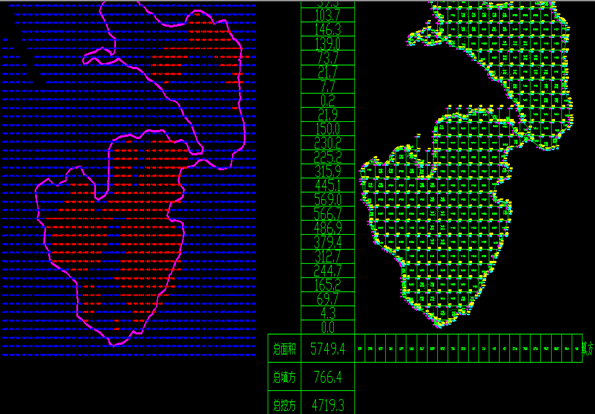
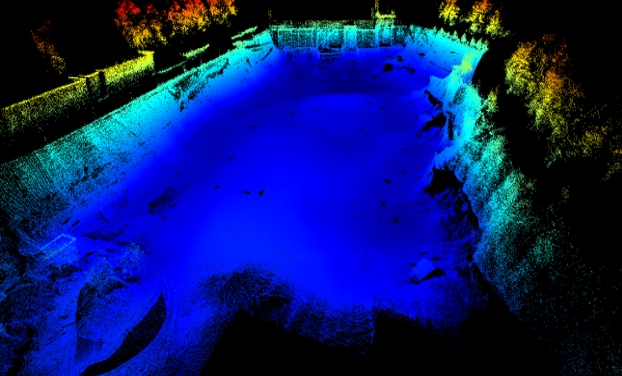
Построение трёхмерной карты дна и бортов водоёма для вычисления точного объёма воды.
Использовался Apache 6 с многолучевым эхолотом. Широкая развёртка позволила снять борта водоёма с высокой точностью.
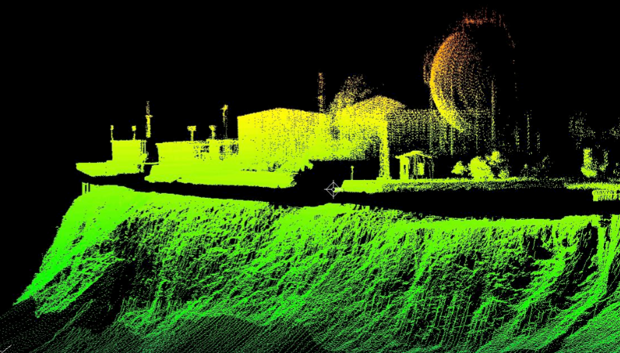
Построение модели дна и наземных портовых строений с использованием многолучевого эхолота и сканера iLidar.
В результате построена детальная трёхмерная модель рельефа дна и всех портовых сооружений.